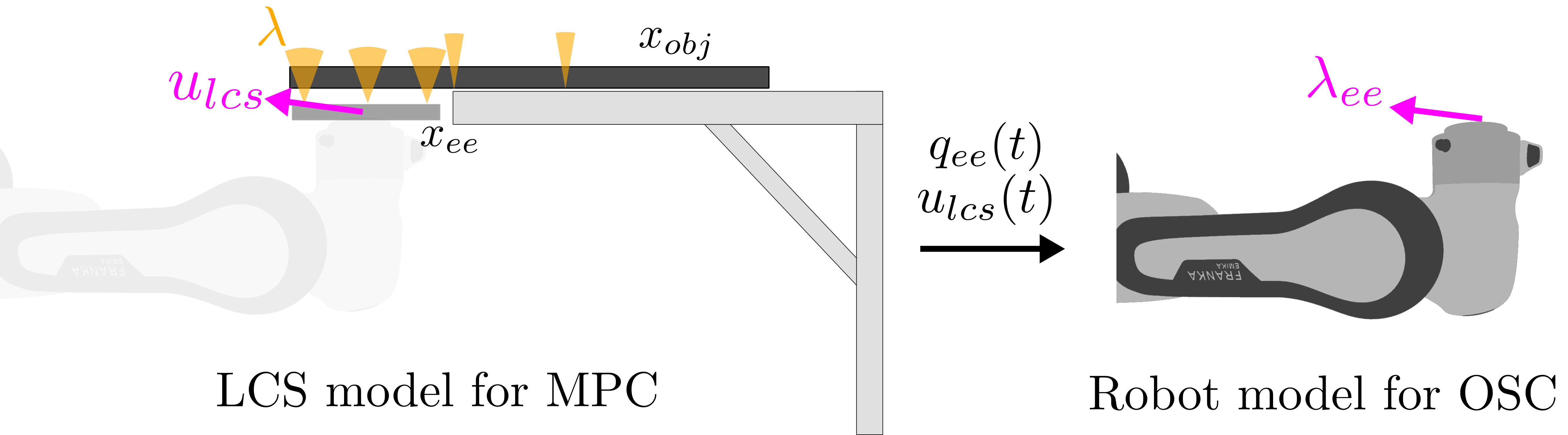
Task Models
We abstract the system into two models. The LCS model captures the contact forces \(\lambda\) between the end effector, tray, and supports. In the LCS model, the robot arm is abstracted away and replaced with direct inputs to the end effector \(u_{lcs}\). We use a robot-only model to track the end effector position \(q_{ee}(t)\) and force \(u_{lcs}(t)\) trajectories commanded from the MPC, so \(\lambda_{ee} = u_{lcs}\).
Contact-Implicit Model Predictive Control
The difficulty of the task is primarily due to the poor predictive performance of dynamic frictional contact models. We utilize feedback on the object state to account for these modeling inaccuracies. Specifically we utilize contact-implicit MPC, which automatically plans for the states, inputs, and contact forces without pre-specified contact modes. Previous solutions would utilize motion primitives (to convert it to a planning problem) or reference trajectories (to convert it to a feedback problem), but our framework does not require either. Additionally, consideration of frictional contact modes in 3D significantly increases the number of contact modes that need to be considered, which makes this one of the most complex tasks successfully reasoned by contact-implicit MPC.
Execution on the physical robot. Tray has a mass of 1kg
The plan visualization for the same experiment shows the planned states, inputs, and contact forces.
Interactive Plan Visualization
Feel free to pan/pause/toggle visual elements. Meshcat animation recording made using Drake.
Animation can be reset by clicking the following ("Open Controls" -> "Animations" -> "reset" -> "play").
Rotation using a Wall
To highlight the generality of the chosen LCS model of our approach, we accomplish an entirely different task by modifying only the controller gains and environment specification. The task is specified only as a final position, where the final target state of the tray is rotated about the z-axis from its initial state.
Negative Rotation around Z-Axis
Positive Rotation around Z-Axis
Unknown Mass/Inertia
We place various objects on top of the tray. We do not inform the MPC of the objects, showcasing moderate robustness to inaccurate mass/inertia. In order to not occlude fiducials used to track the position of the tray, we place the objects closer to the edges of the tray which has the additional effect of shifting the center of mass.
Sugar Box (515g, ~50% tray mass)
Mug (319g, ~30% tray mass)
Advantages of a Model-Based Controller
Although we showcase moderate robustness to incorrect object mass/inertia, our model-based framework also allows us to easily accomodate changes to the object model. For the task below, we successfully manipulate a stack of two trays by giving the MPC an updated model.
Two stacked trays (MPC model has updated mass/inertia/geometry)
Ablation Study (Force Tracking)
Tracking the end effector force commanded by the MPC improves the speed and reliability of the task.
Individual Ablation Study VideosTracking end effector force trajectory (8/10 success)
NOT tracking end effector force trajectory (3/10 success)
Reliability Testing
We evaluate the reliability of our approach and its robustness to initialization by repeatedly executing the task without manual resets. Our framework successfully completes 6 cycles before deviating too far.
Video at 4x realtime